Image:
 Author: The Linkage Group: Technical Filesize: 91.18 kB Date added: 2018-03-01 Rating: 6.8 Downloads: 5382 Views: 843 Comments: 15 Ratings: 5 Times favored: 0 Made with: Algodoo v2.1.0 Tags:
|
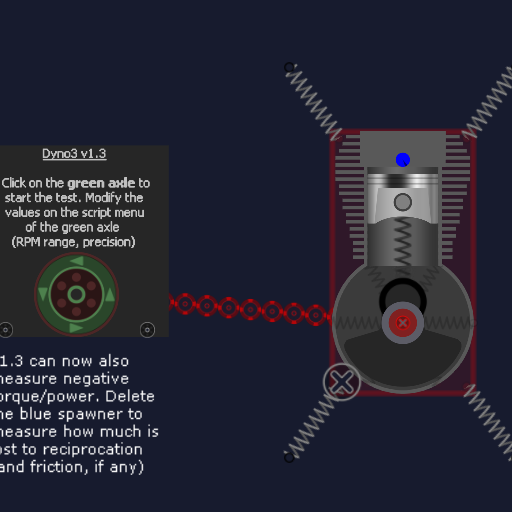
Third iteration of the dyno. This one is completely rewritten to have incredibly little overhead, by running as little scripts as possible on each frame  Also comes with peak torque/power detection and you can have as many graphs as you want (measure, then modify the engine, then measure again, then compare!)
v1.3 now also measures negative torque/power (basically braking forces). |
Last edited at 2018/09/14 23:17:02 by The Linkage
Please log in to rate this scene |