|
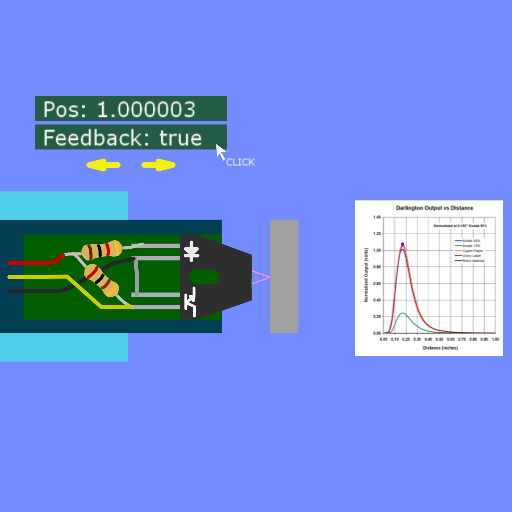
Title: Position Sensor B
Rating: 5
Filesize: 54.22 kB
Downloads: 529
Comments: 0
Ratings: 1
Date added: 2013/12/13 23:13:39
Made with: Algodoo v2.1.0
Rating: 
|
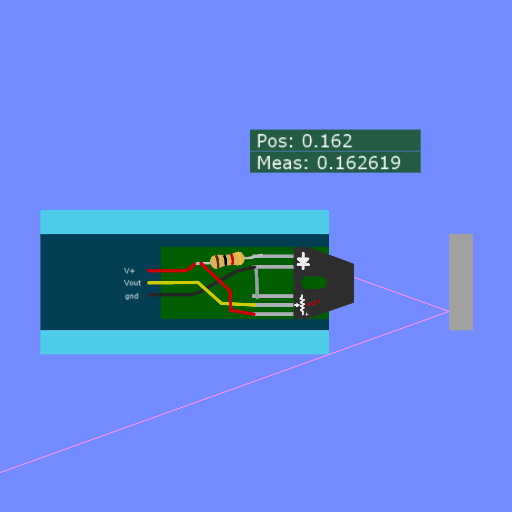
Title: KM №013
Rating: 6.5
Filesize: 357.99 kB
Downloads: 6907
Comments: 6
Ratings: 4
Date added: 2019/11/27 17:31:12
Made with: Algodoo v2.1.0
Rating: 
|
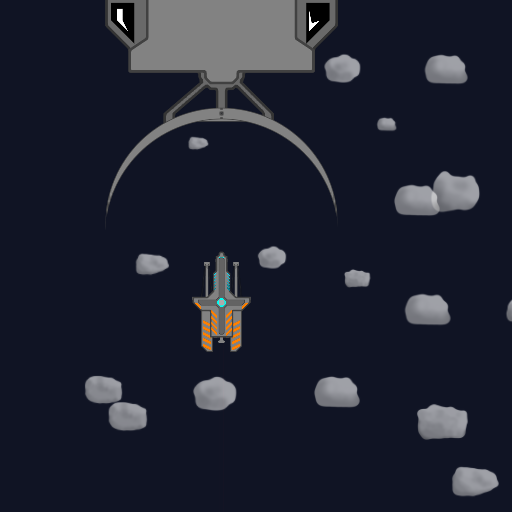
Title: Landing Sensor
Rating: 4.8889
Filesize: 71.16 kB
Downloads: 1242
Comments: 0
Ratings: 3
Date added: 2011/02/09 16:54:19
Made with: Algodoo before v1.8.5
Rating:
|
Title: Smashable Electronics!
Rating: 5
Filesize: 4.62 MB
Downloads: 8282
Comments: 19
Ratings: 1
Date added: 2012/08/19 17:41:10
Made with: Algodoo v2.0.1 Edu
Rating:
|
Title: Air Speed Sensor Wheel
Rating: 5
Filesize: 35.39 kB
Downloads: 595
Comments: 0
Ratings: 1
Date added: 2011/09/08 21:56:39
Made with: Algodoo v1.9.9b
Rating:
|
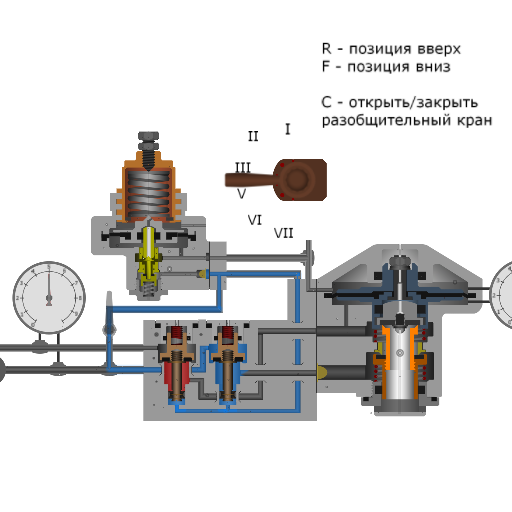
Title: Engine mech - Gears
Rating: 5
Filesize: 299.44 kB
Downloads: 1153
Comments: 0
Ratings: 1
Date added: 2014/06/06 13:48:09
Made with: Algodoo v2.1.0
Rating:
|



 Did you use PID algorithm for the position control?
Did you use PID algorithm for the position control?


