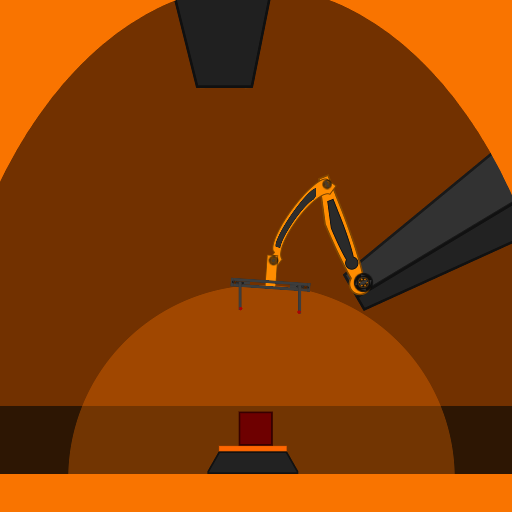
the "programming" for each joint is in
Scene.my.robotMoves_0
Scene.my.robotMoves_1
Scene.my.robo-
tMoves_2
have phun

UPDATE: had the frequency at 1000 instead of 100, fixed this, should work now!
explanation for the programming arrays:
Scene.my.robotMoves_2 = [6, 0, 1, 300, 1, 360, 2, 390, 2, 580, 2, 620, 1]
explanation: robotMoves_2 is the last joint (the "hand" joint)
Scene.my.robotMoves_2 = [number of keyframes, framenumber1, joint position1, framenumber2, joint position2, framenumber3, joint position3, framenumber4, joint position4, framenumber5, joint position5, framenumber6, joint position6]
joint position should be between 0 and 2, which is 0 - 360 �
the arm will try to make smooth transitions between keyframes...
please comment & rate
UPDATE: Improved movement and fixed some code, looks a bit smoother now
UPDATE 2: Increased reaction speed of motor 3 (hand) and adjusted it's programming a little