|
Title: S.D.K.R the robot
Rating: 5.5
Filesize: 8.58 kB
Downloads: 889
Comments: 3
Ratings: 2
Date added: 2012/11/26 07:33:07
Made with: Algodoo v2.0.1
Rating: 
|
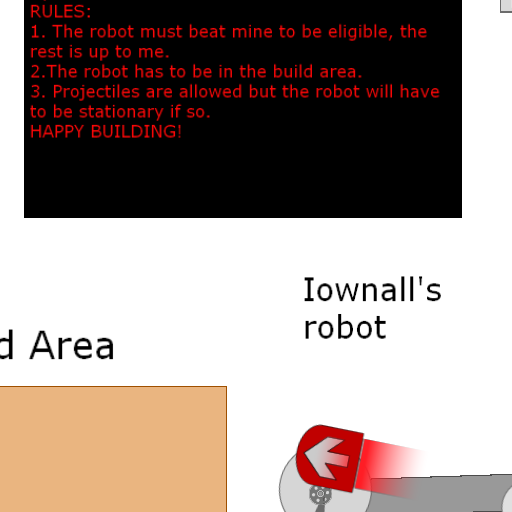
Title: ROBOT FIGHT CONTEST---Defeat the Pusher! READ DESCRIPTION
Rating: 5
Filesize: 46.53 kB
Downloads: 1124
Comments: 5
Ratings: 1
Date added: 2012/02/02 22:46:08
Made with: Algodoo v2.0.1
Rating: 
|
Title: Walkermann RBE-001
Rating: 5
Filesize: 272.46 kB
Downloads: 1746
Comments: 1
Ratings: 1
Date added: 2013/09/07 13:01:13
Made with: Algodoo v2.1.0
Rating:
|
Title: Robot Dance (VietCreator Style)
Rating: 5
Filesize: 166.13 kB
Downloads: 851
Comments: 0
Ratings: 1
Date added: 2014/12/30 20:21:24
Made with: Algodoo v2.1.0
Rating:
|
Title: top-down robot old vs new
Rating: 6.1111
Filesize: 20.28 kB
Downloads: 952
Comments: 2
Ratings: 3
Date added: 2009/10/31 12:30:17
Made with: Algodoo before v1.8.5
Rating:
|
Title: robot game demo
Rating: 5
Filesize: 9.78 kB
Downloads: 393
Comments: 0
Ratings: 1
Date added: 2019/07/04 21:53:33
Made with: Algodoo v2.1.0
Rating:
|


.png)