Image:
 Author: UnityDogGaming04 Group: Default Filesize: 112.55 kB Date added: 2022-03-03 Rating: 5.6 Downloads: 2701 Views: 428 Comments: 2 Ratings: 2 Times favored: 0 Made with: Algodoo v2.1.0 Tags:
|
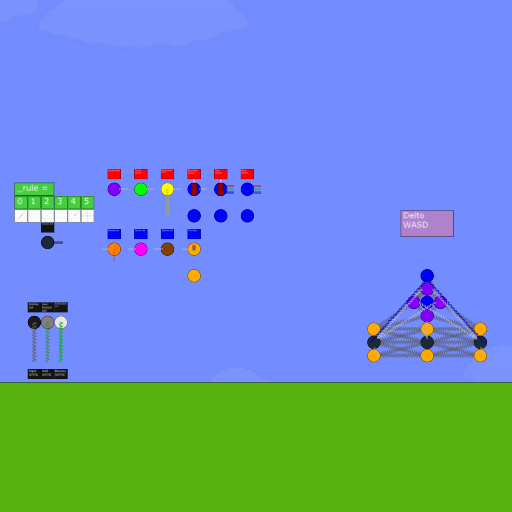
This is a copy of my PolyBuild scene, with neurons and other things.
The neuron also comes from an older scene of mine where I experimented with basic image recognition. Everything else, however, is new.
SENSORS/INPUTS:
Control dot: outputs 1 if _key is pressed (change in script menu)
Touch sensor: pulses when in contact with something
Proprioception sensor: outputs the distance between itself and whatever the yellow spring is attached to
Proximity sensor: outputs the straight line distance to the object before it
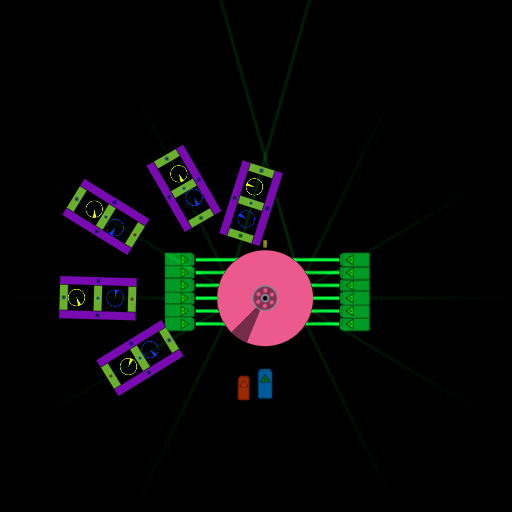
Color sensor: outputs the color of the object the laser hits, returns all 3 RGB values through separate springs
Gyro sensor: returns the 2D vector representing its orientation (red is vertical, green is horizontal) and angvel (blue)
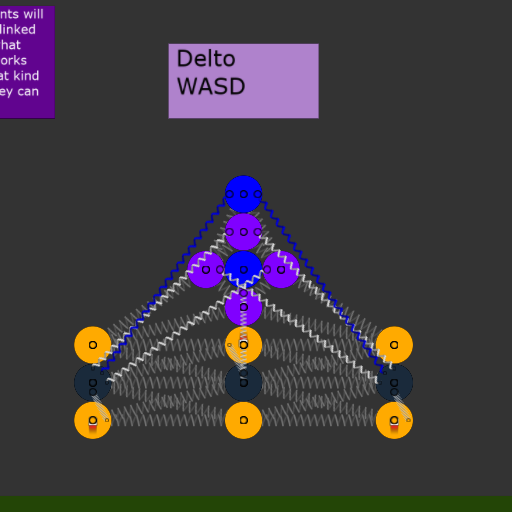
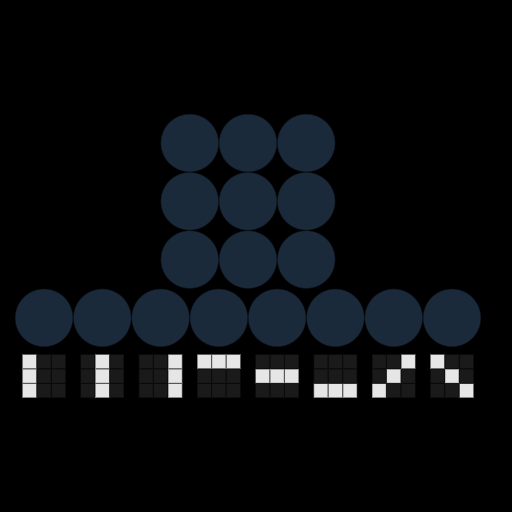
NEURON:
Can recieve virtually unlimited imputs, and can output virtually infinite identical signals. Copy it and its attached synapse to make a neural network.
_rule boxes detail the post-processing function the neuron applies to its internal accumulator value before being sent out. Inputs cannot directly connect to outputs, they must pass through a neuron to function properly.
OUTPUTS:
Muscle dot: the white spring is the input wire, the orange spring is the muscle, its length is set to the input from the wire.
Sticky dot: resists motion proportional to its input.
Ballast dot: changes density based on its input.
Thruster: applies thrust based on its input.
Neurons now don't get stuck at infinity, which allows _rule = 2 to function properly, also moved color changing to the bottom of postStep to allow it to render the iterated value immediately instead of during the next frame
best track time: 4.4500003 [267] |