Image:
 Author: mori-d Group: Default Filesize: 389.63 kB Date added: 2019-06-08 Rating: 6.1 Downloads: 8760 Views: 1288 Comments: 4 Ratings: 3 Times favored: 0 Made with: Algodoo v2.1.0 Tags:
|
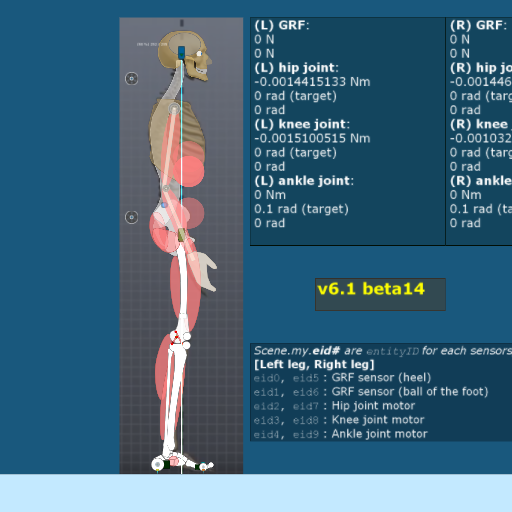
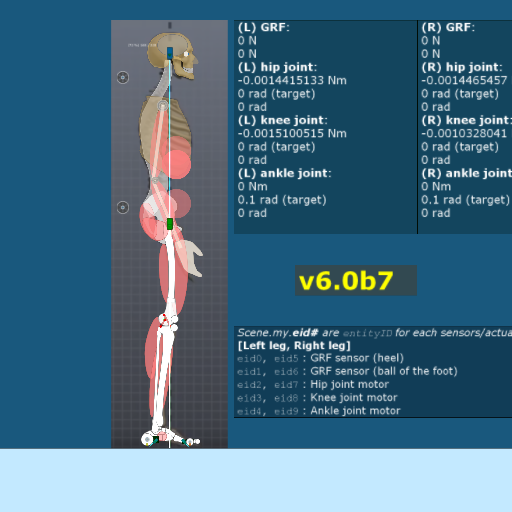
# Biped v6.1 - A quasi passive bipedal walker
[youtube]http://www.youtube.com/watch?v=2mPEsgyrOfM&feature=youtu.be[/youtube]
No more unexpected jumping.
i.e. stance leg wait for swing leg touching down if needed, and it don't wait for if not needed.
## Control method
- Time-based scheduling (Periodic pendulum of motorized limbs)
- [NEW] Event driven re-scheduling (Reschedule limbs every when a feet touched down on the floor)
- [IMPROVED] Weak auto-balance (Adaptive control for target angle of servo-motors)
## Actuators
- Servo-motors (shoulder, hip, knee, and ankle joint)
## Sensors
- Tilt sensor ("angle" of upper body)
- Rotary encoder ("angle" of thigh, shin/calf, and foot)
- Ground Reaction Force (GRF) sensor (heel and ball of the foot)
## Note
- Red, green and blue laser rays show the angle of thigh and upper body. |
Last edited at 2019/06/08 18:17:25 by mori-d
Please log in to rate this scene |