today i made Mch progress on my walking bots
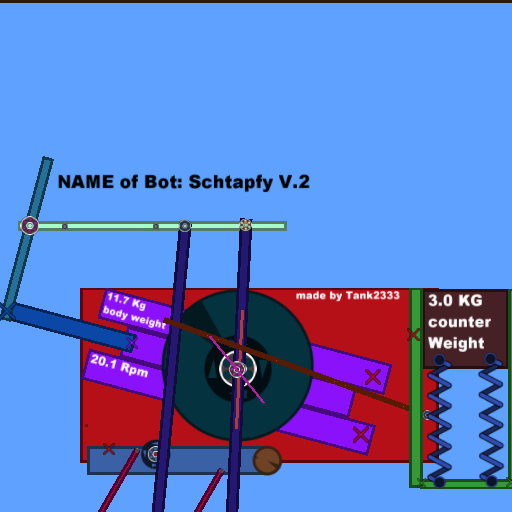
this bot called schtampfy
i finally could make him walk by himself
but this is not a "self balancing" bot he just "is" balanced and cant encounter a change in his path such as little obstacle or such
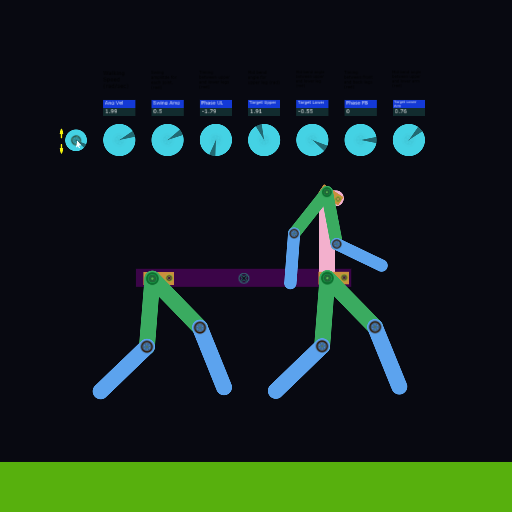
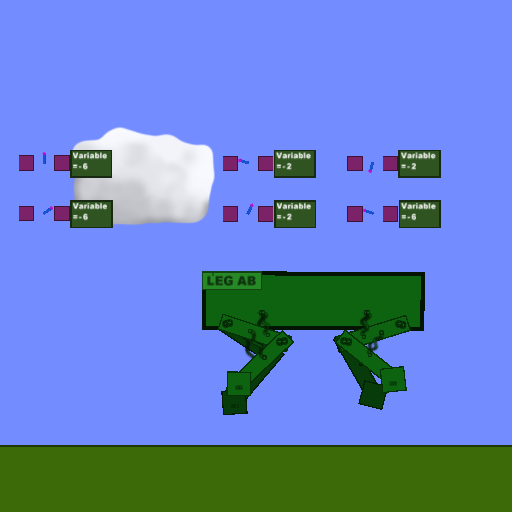
but there is a problem with the legs, the feets are carried by the 2 darkblue sticks so that schtampfy could walk without the origanl legs
i will try to find another method to move the feets
but anyway this is kind of a breakthrough in my work
i will improve this technique and im going to develop a
method to change the walking style on the fly
wich will in future, togather with weight balancing, be a big part of a selfbalancing walker
so these are my next goals stay tuned for more

i hope u like it
CHANGELOG:
Schtapfy V.2
-added damped counter weight for testing
-cloned original one to see the differents
-description in Scene plz read
-EDIT made a hotFix because of a saving bug




.png)





