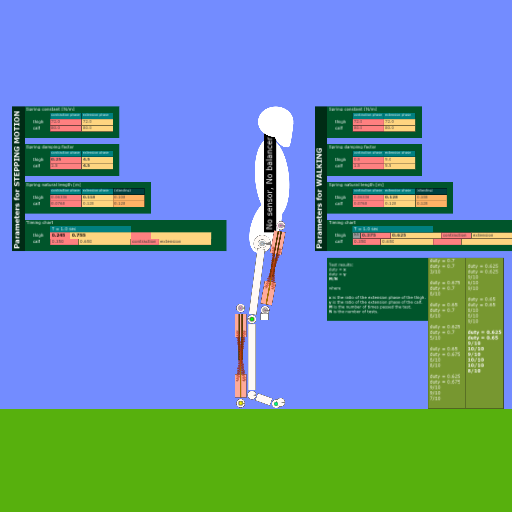
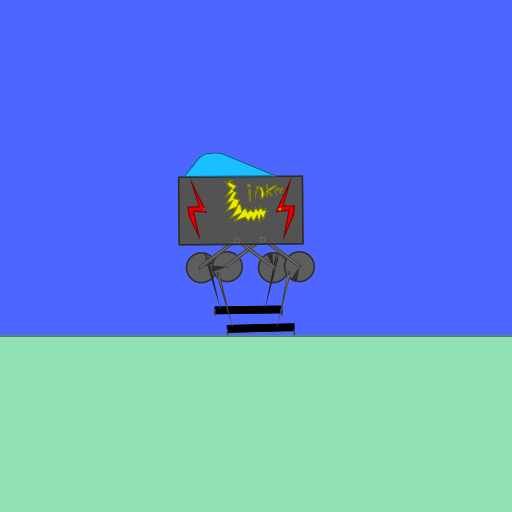
Legs of the biped walker is actuated by an artificial muscle (i.e. a controlled spring)
Parameters of spring are switched periodically as follows.
In the contraction phase: short natural length, small damping factor.
In the extension phase: long natural length, large damping factor.
Note: The spring parameters for the thigh and calf are not same.
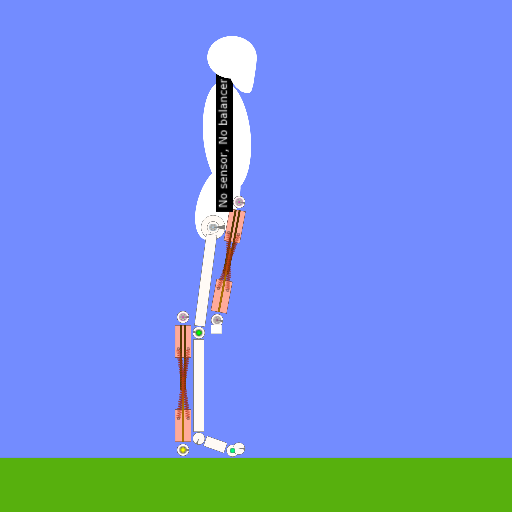
There is no sensor, no balancer.
It's a kind of quasi-passive walker.
ver. 3.3: Improved parameters.
The quasi-passive walker can walk a seesaw and a stairway of low height.
And the other one can do the stepping motion.