Image:
 Author: mori-d Group: Default Filesize: 63.1 kB Date added: 2017-11-15 Rating: 5 Downloads: 1542 Views: 1028 Comments: 1 Ratings: 1 Times favored: 0 Made with: Algodoo v2.1.0 Tags:
robot,
walker,
biped
|
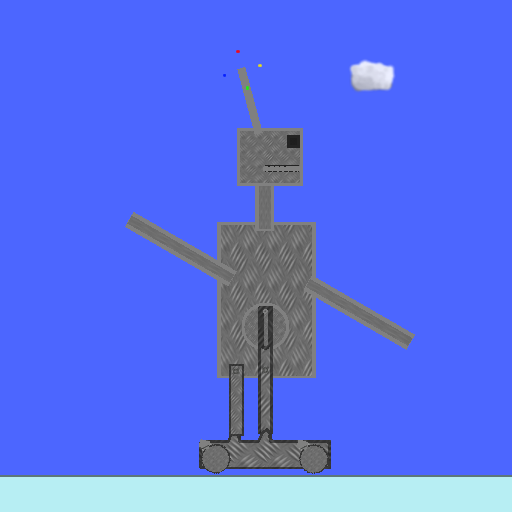
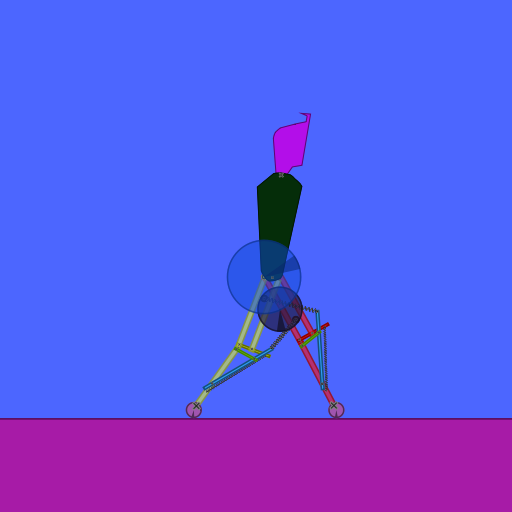
Biped ver.3.2
Legs of the biped walker is actuated by an artificial muscle (i.e. a controlled spring)
Parameters of spring are switched periodically as follows.
In the contraction phase: short natural length, small damping factor.
In the extension phase: long natural length, large damping factor.
Note: The spring parameters for the thigh and calf are not same.
There is no sensor, no balancer.
It's a kind of quasi-passive walker.
ver. 3.2: Improved parameters.
The quasi-passive walker can walk a seesaw and a stairway of low height. |
Last edited at 2017/11/18 09:48:24 by mori-d
Please log in to rate this scene |