

Theo Jansen linkage
From Algodoo
(Skapade sidan med '{{Lesson |language=lesson-swedish |title=Theo Jansen linkage |description=I den här lektionen undersöks hur bra olika kombinationer av theo jansen linkage tar sig fram i olika ...') |
|||
| Line 2: | Line 2: | ||
|language=lesson-swedish | |language=lesson-swedish | ||
|title=Theo Jansen linkage | |title=Theo Jansen linkage | ||
| - | |description=I den här lektionen undersöks hur bra olika kombinationer av | + | |description=I den här lektionen undersöks hur bra olika kombinationer av Theo Jansen linkage tar sig fram i olika typer av terräng. |
|target=lesson-keystage5 | |target=lesson-keystage5 | ||
|type=lesson-demonstration, lesson-exercise | |type=lesson-demonstration, lesson-exercise | ||
|keywords=lesson-motion | |keywords=lesson-motion | ||
| - | |objectives=Eleven ska få förståelse varför | + | |objectives=Eleven ska få förståelse varför Theo Jansen linkage fungerar samt dess fördelar och nackdelar. Hur man kan konstruera olika walkers med theo jansens idé. |
|inclass=Eleven testar redan skapade Walkers och utvärderar dem. Väljer därefter en av dem och bygger vidare. | |inclass=Eleven testar redan skapade Walkers och utvärderar dem. Väljer därefter en av dem och bygger vidare. | ||
}} | }} | ||
| Line 17: | Line 17: | ||
{{Section | {{Section | ||
|headline=Bakgrund | |headline=Bakgrund | ||
| - | |text=En | + | |text=En walker är en maskin som med hjälp av ett flertal mekaniska stela leder (”mechanical linkages”) sammankopplade i fogar, kan förflytta sig med mjuka gående rörelser. Detta sker genom att med hjälp av en enkel roterande motor omvandla motorns rotationsenergi till linjära rörelser som lyfter och flyttar benen. |
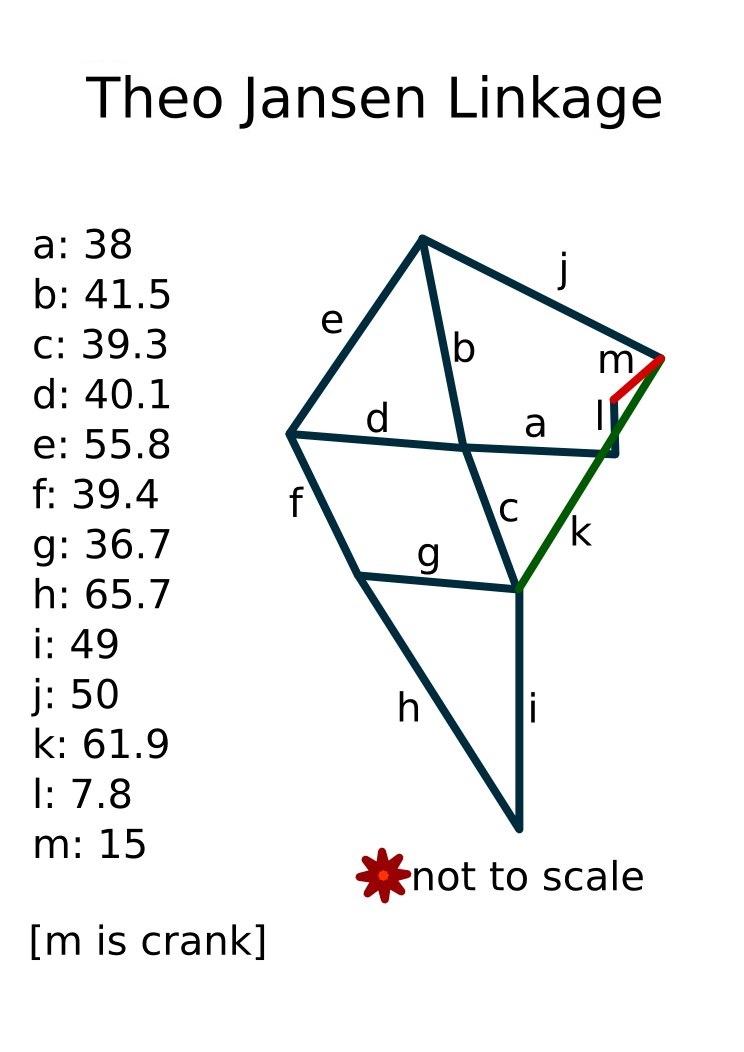
|image=TheoJansenLinkage.jpg | |image=TheoJansenLinkage.jpg | ||
|caption=Mått på theo jansen linkage | |caption=Mått på theo jansen linkage | ||
| Line 30: | Line 30: | ||
- Vilken Walker klarar den största lutningen? Vilken går snabbast i lutning? | - Vilken Walker klarar den största lutningen? Vilken går snabbast i lutning? | ||
| - | - Bygg ut någon av de redan existerande Walkers | + | - Bygg ut någon av de redan existerande Walkers, och jämför med redan existerande.' |
Kommentera alla svar. | Kommentera alla svar. | ||
| Line 52: | Line 52: | ||
|text=Att ta tiden på en Walker mellan två punkter går att göra på flera olika sätt. Rekommenderat är att använda sig av det inbyggda grafverktyget. | |text=Att ta tiden på en Walker mellan två punkter går att göra på flera olika sätt. Rekommenderat är att använda sig av det inbyggda grafverktyget. | ||
| - | 1. Välj en del som inte tillhör något ben, | + | 1. Välj en del som inte tillhör något ben, t.ex. hjulet som roterar, och välj visa graf. |
| - | 2. Välj att plotta position i X-led mot Tid, därefter sätta | + | 2. Välj att plotta position i X-led mot Tid, därefter sätta tidsspann på Inf. |
3. Eftersom det går att ha mer än en graf samtidigt kan tiden för flera olika Walkers beräknas samtidigt. | 3. Eftersom det går att ha mer än en graf samtidigt kan tiden för flera olika Walkers beräknas samtidigt. | ||
| Line 66: | Line 66: | ||
1. Markera en walker av de två till höger. | 1. Markera en walker av de två till höger. | ||
| - | 2. | + | 2. Kopiera och klistra in. |
3. Kopiera det enskilda benet och klistra in | 3. Kopiera det enskilda benet och klistra in | ||
| Line 80: | Line 80: | ||
8. För att användas måste SAMTLIGA blåa fixeringspunkter tas bort | 8. För att användas måste SAMTLIGA blåa fixeringspunkter tas bort | ||
|image=Extraben.jpg | |image=Extraben.jpg | ||
| + | |caption=Bild av en benlänk | ||
}} | }} | ||
{{EndInAlgodoo}} | {{EndInAlgodoo}} | ||
Latest revision as of 14:14, 15 May 2012
Theo Jansen linkage
| Language: | Svenska |
|---|---|
| Description: | I den här lektionen undersöks hur bra olika kombinationer av Theo Jansen linkage tar sig fram i olika typer av terräng. |
| Target: | Key Stage 5 |
| Category: | Demonstration, Exercise |
| Discipline: | Motion |
| Learning objectives: |
Eleven ska få förståelse varför Theo Jansen linkage fungerar samt dess fördelar och nackdelar. Hur man kan konstruera olika walkers med theo jansens idé. |
| In class: | Eleven testar redan skapade Walkers och utvärderar dem. Väljer därefter en av dem och bygger vidare. |

Bakgrund
Uppgift
- Klarar alla Walkers hinderbanana? Om inte vilka klarar vilka klarar inte? Vad kan vara anledningen till det?
- Vilken Walker är snabbast på hinderbanana? Är samma Walker snabbast på plan mark?
- Vilken Walker klarar den största lutningen? Vilken går snabbast i lutning?
- Bygg ut någon av de redan existerande Walkers, och jämför med redan existerande.'
Kommentera alla svar.
Använda en Walker
2. Kopiera walken (Ctrl+C). Viktigt att KOPIERA och inte bara flytta.
3. Klistra in (Ctrl+V)
4. Flytta den inklistrade walkern just ovanför marken. EJ under.
5. Markera och ta bort den BLÅA fixeringspunkten till höger på Walkern
6. Starta simuleringen
Ta tiden på en Walker
1. Välj en del som inte tillhör något ben, t.ex. hjulet som roterar, och välj visa graf.
2. Välj att plotta position i X-led mot Tid, därefter sätta tidsspann på Inf.
3. Eftersom det går att ha mer än en graf samtidigt kan tiden för flera olika Walkers beräknas samtidigt.
Detta sätt att mäta tiden på kan användas för såväl hinderbanan som plan mark och för lutning. Kom ihåg att använda samma startpunkt och samma slutpunkt för att olika tider ska kunna jämföras.
Lägga till fler ben
1. Markera en walker av de två till höger.
2. Kopiera och klistra in.
3. Kopiera det enskilda benet och klistra in
4. Flytta benet så att det just överlappar den röda delen av walkern. (lättast genom att bara visa lager ”I” och ”J”)
5. Fäst benet till Walkern genom antingen en fixeringspunkt eller med en axel
6. Om den väljs att fästas med en axel så måste även de intilliggande fjädrarna kopieras och fästas. Noga att dem enbart fäster i de röda delarna. Två på benet, en på walkern
7. Detta kan göras tills lämplig längd på walkern är uppnådd
8. För att användas måste SAMTLIGA blåa fixeringspunkter tas bort

